RoboTech
Junior Member / Новичок
Участник № / Member № 6907
отправлено / posted
подскажите, каким способом можно посимвольно (побайтно) отправлять в Com порт ?
Сообщения / Posts 27 | Из / From: Russia
| IP / IP: IP адрес / IP address |
отправлено / posted
Общение с COM-портом осуществляется с помощью драйверов, поставляемых в составе Trace Mode 6 или разработанных пользователями в соответствии со спецификациями раздела "Разработка драйверов". В качестве дополнительного средства можно использовать канал CALL.Vector (см. описание канала).
Сообщения / Posts 17658 | Из / From: Россия
| IP / IP: IP адрес / IP address |
RoboTech
Junior Member / Новичок
Участник № / Member № 6907
отправлено / posted
Снова добрый день. Появились новые проблемы с COM портом. Есть шаговый двигатель, который подключается через COM порт, задача простая, крутить через TM 6 этот самый двигатель. Создал RTM, Экран, Программу ST, канал CALL и группу COM порты. Вроде всё правильно привязал, но сигнал не идет в COM порт. Поставил сканер портов, пишет таймауты. В чем может быть проблема?
Сообщения / Posts 27 | Из / From: Russia
| IP / IP: IP адрес / IP address |
отправлено / posted
По какому логическому протоколу Вы пытаетесь подключить шаговый двигатель? Какие команды и как Вы пытаетесь послать в COM-порт?
Сообщения / Posts 17658 | Из / From: Россия
| IP / IP: IP адрес / IP address |
RoboTech
Junior Member / Новичок
Участник № / Member № 6907
отправлено / posted
quote:Отправитель / Originally posted by AdAstra Technical Support: По какому логическому протоколу Вы пытаетесь подключить шаговый двигатель? Какие команды и как Вы пытаетесь послать в COM-порт?
Программный блок управления SMSD-4.2 соединяется с компьютером через USB A-B. Через язык IL пытаюсь подать простые команды DR SS SD MV. Для шагового двигателя.
Сообщения / Posts 27 | Из / From: Russia
| IP / IP: IP адрес / IP address |
отправлено / posted
Каналы в Trace Mode 6 работают с COM-портом только через встроенные драйверы - черз компоненты слоя "Источники/Приемники". Как Вы подключаете канал к COM-порту? Какой драйвер Вы используете?
Сообщения / Posts 17658 | Из / From: Россия
| IP / IP: IP адрес / IP address |
RoboTech
Junior Member / Новичок
Участник № / Member № 6907
отправлено / posted
quote:Отправитель / Originally posted by AdAstra Technical Support
отправлено / posted
Этот источник предусматривает наличие Вашего пользовательского драйвера (см. раздел "Разработка драйверов.../Драйверы t11 и t12").
Сообщения / Posts 17658 | Из / From: Россия
| IP / IP: IP адрес / IP address |
RoboTech
Junior Member / Новичок
Участник № / Member № 6907
отправлено / posted
quote:Отправитель / Originally posted by AdAstra Technical Suppor
В этом возможно и проблема. Мануал написан довольно странным образом. Есть готовый драйвер, уже написанный. Как его добавить в TM 6. Либо в сам проект? Все очень слишком сложно получается, для такой простой вещи, как запуск шагового двигателя.
Сообщения / Posts 27 | Из / From: Russia
| IP / IP: IP адрес / IP address |
отправлено / posted
Готовый драйвер нельзя подключить ни к какому ПО, если не согласована спецификация функций вызова драйвера. Это общий принцип.
В нашем руководстве задана определенная спецификация функций вызова драйвера. Чтобы конкретный драйвер подключить, надо его адаптировать к этой спецификации.
Пришлите, пожалуйста, подробное описание протокола связи с шаговым двигателем на адрес техподдержки hotline@adastra.ru (со ссылкой на этот топик).
Сообщения / Posts 17658 | Из / From: Россия
| IP / IP: IP адрес / IP address |
RoboTech
Junior Member / Новичок
Участник № / Member № 6907
отправлено / posted
Возможно я не правильно поставил вопрос. Как через COM порт отправлять последовательность символов. Через какие каналы? Как их правильно привязать к COM порту. Как их правильно отредактировать?
отправлено / posted
Именно для ответа на Ваш вопрос нам нужно иметь описание протокола: - настройки COM-порта, - форматы кадров запросов, команд и ответов, - форматы передаваемых, получаемых данных.
RoboTech
Junior Member / Новичок
Участник № / Member № 6907
отправлено / posted
quote:Отправитель / Originally posted by AdAstra Technical Support: Именно для ответа на Ваш вопрос нам нужно иметь описание протокола: - настройки COM-порта, - форматы кадров запросов, команд и ответов, - форматы передаваемых, получаемых данных.
Пришлите нам, пожалуйста, описание протокола.
COM port TM 6. Форматы запросов. Не совсем понял вопроса, нужно осуществлять передачу побайтно (посимвольно). Следующие исполнительные команды, такие как: DR - вращение вправо. AL - ускорение. MV - непрерывное движение и так далее.
Сообщения / Posts 27 | Из / From: Russia
| IP / IP: IP адрес / IP address |
отправлено / posted
Кроме командных символов в кадре команды/ответа могут быть заголовок, концевик, контрольная сумма и блок данных. Тот факт, что при работе с имеющимся у Вас драйвером Вы этого не видите, не означает, что драйвер не формирует кадр в соответствии с заложенным в него протоколом.
Если у Вас нет ответов на заданные выше вопросы ( - настройки COM-порта, - как задается номер устройства в сети, - форматы кадров запросов, команд и ответов, - форматы передаваемых, получаемых данных. ), свяжитесь, пожалуйста, с поставщиком оборудования и получите у него необходимую информацию.
Сообщения / Posts 17658 | Из / From: Россия
| IP / IP: IP адрес / IP address |
RoboTech
Junior Member / Новичок
Участник № / Member № 6907
отправлено / posted
quote:Отправитель / Originally posted by AdAstra Technical Support
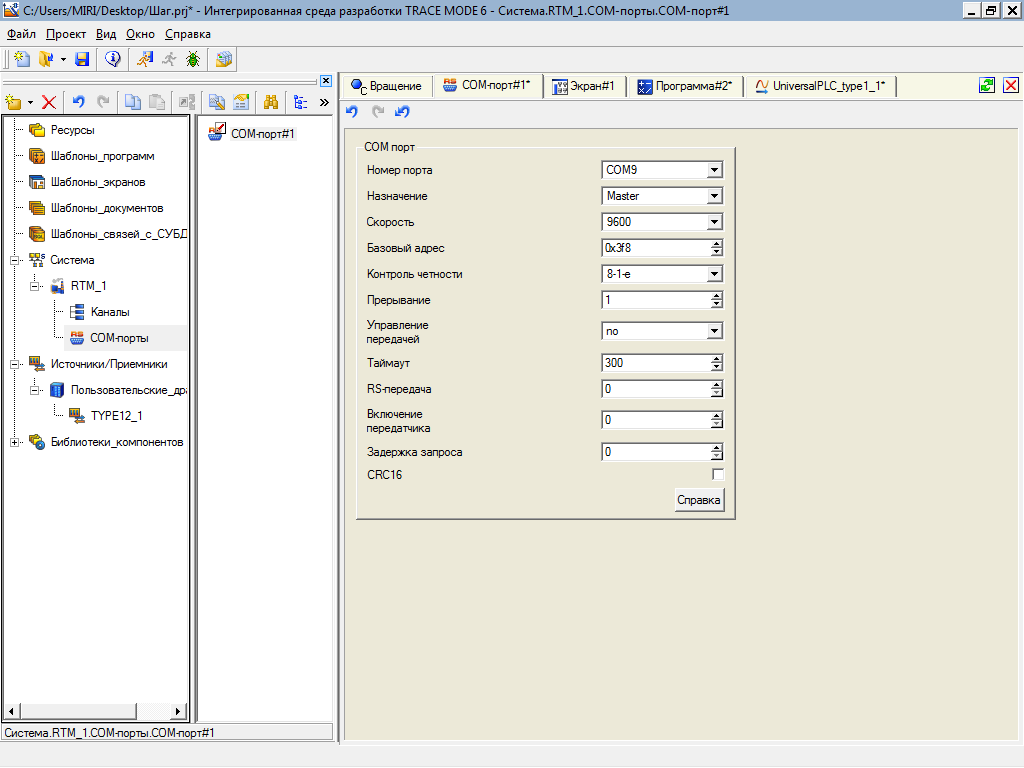
Есть блок управления SMSD-4.2 Который подключатся к системе через USB a-b. Который генерирует драйвер виртуального COM-порта. То есть, на выходе мы получаем программный COM-порт (CP210x USB to UART Bridge (COM9))
отправлено / posted
Решения подобных задач в Trace Mode 6 существуют.
Однако, вынужден еще раз повторить: до тех пор, пока мы не будем иметь достаточной информации о протоколе обмена с устройством, мы не сможем предложить Вам способ решения Вашей задачи.

 Тема закрыта / Topic Closed
Тема закрыта / Topic Closed



 Printer-friendly view of this topic
Printer-friendly view of this topic